Night Collision Avoidance System by detection of Forward Vehicles in drive lane and Head-up Display notification
01 Jul 2018
Reading time ~1 minute
Summary
We efficiently detected the taillights of front vehicles in nighttime environments by converting the RGB color space to HSV and YCbCr. The detection of taillights was used to generate a candidate pool for vehicles. Haar-like features and the AdaBoost algorithm were then employed, validating the vehicles using 2000 positive and 5000 negative images. A Region of Interest (ROI) was specified to reduce processing speed in real-time video processing.
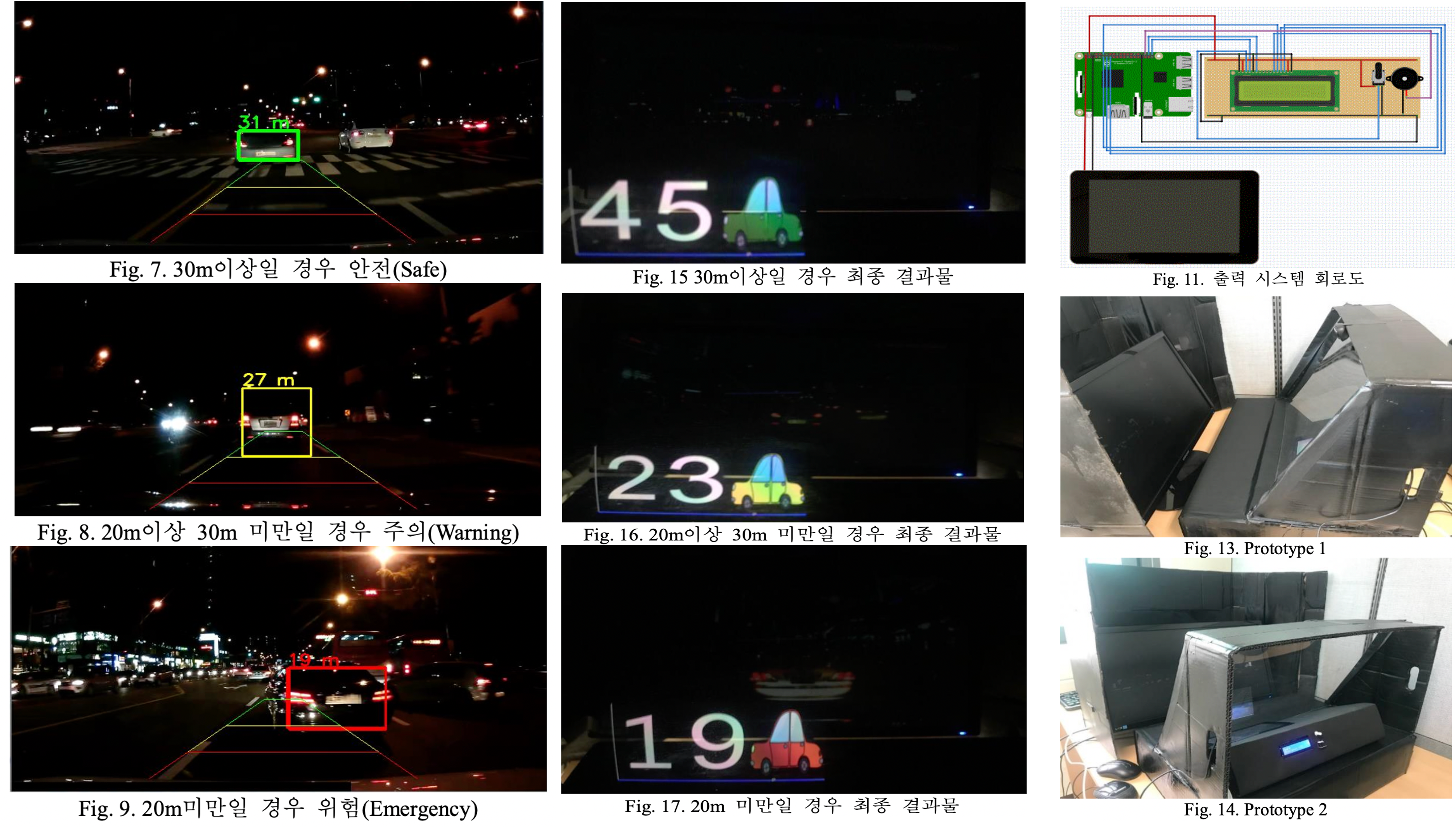
To calculate the distance between vehicles detected based on taillights, we estimated the vehicle width based on each taillight and computed the inter-vehicle distance. To effectively communicate the risk of a collision to the driver, a Head-up Display (HUD) was created, indicating danger levels using three levels of sound (Forward Collision Warning - FCW).
To further reduce the error rate in vehicle detection, we added tracking using Mean-Shift Tracking or Kalman Filter to track future video frames of vehicles. Additionally, for improved performance in forward vehicle detection, we plan to explore the use of a more accurate classifier continuously. Our future research will focus on exploring effective methods to enhance performance continuously.